
粒子陰影測(cè)速成套系統(tǒng)
LED系統(tǒng)以教育價(jià)格提供卓越的安全性
與基于激光的顆粒圖像測(cè)速系統(tǒng)相關(guān)的成本和安全問(wèn)題有效地消除了它們?cè)诒究粕嘤?xùn)中的使用。ISSI已開發(fā)出一種經(jīng)濟(jì)高效的替代方法,即粒子陰影測(cè)速(PSV),如下圖所示:
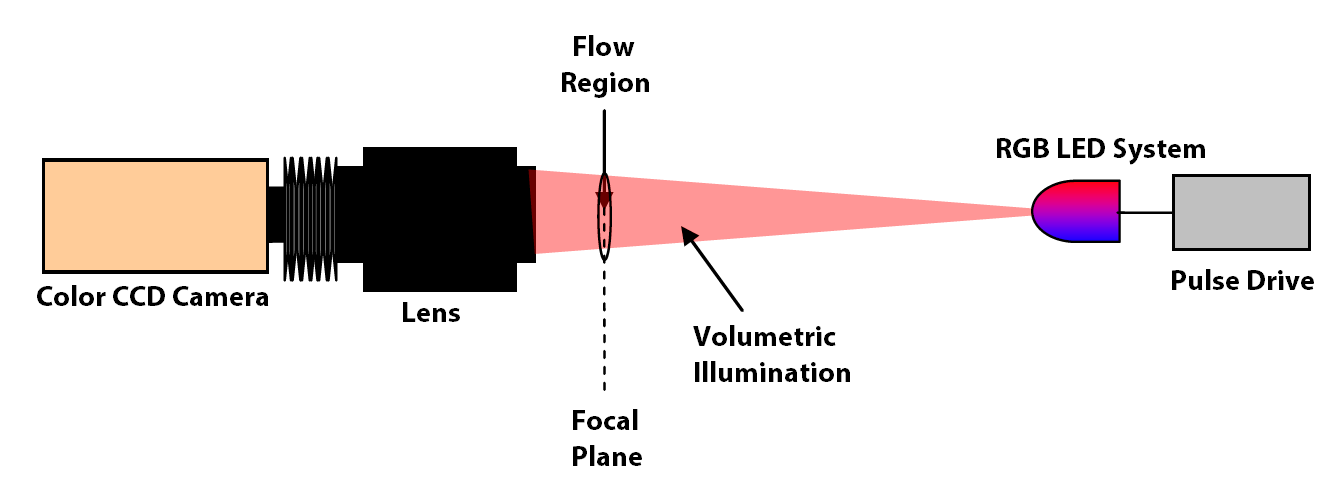
PSV使用消光(粒子陰影)而不是激光薄片中的光散射,從而在低得多的照明水平下實(shí)現(xiàn)了高質(zhì)量的粒子成像。這些安全照明水平可以由脈沖LED系統(tǒng)產(chǎn)生,而成本僅為脈沖激光的一小部分。多色LED照明允許使用低速攝像頭,從而進(jìn)一步降低了系統(tǒng)成本。依次對(duì)不同顏色的LED進(jìn)行高速脈沖,并在相機(jī)的三個(gè)色彩平面上的單個(gè)幀中捕獲相繼的粒子圖像。狹窄的景深光學(xué)器件用于對(duì)流量?jī)?nèi)的二維平面成像,類似于使用激光片所實(shí)現(xiàn)的效果??梢栽诳拷砻娴奈恢眠M(jìn)行測(cè)量,因?yàn)樵撓到y(tǒng)不會(huì)因表面反射而退化,而反射會(huì)嚴(yán)重限制基于激光的系統(tǒng)。
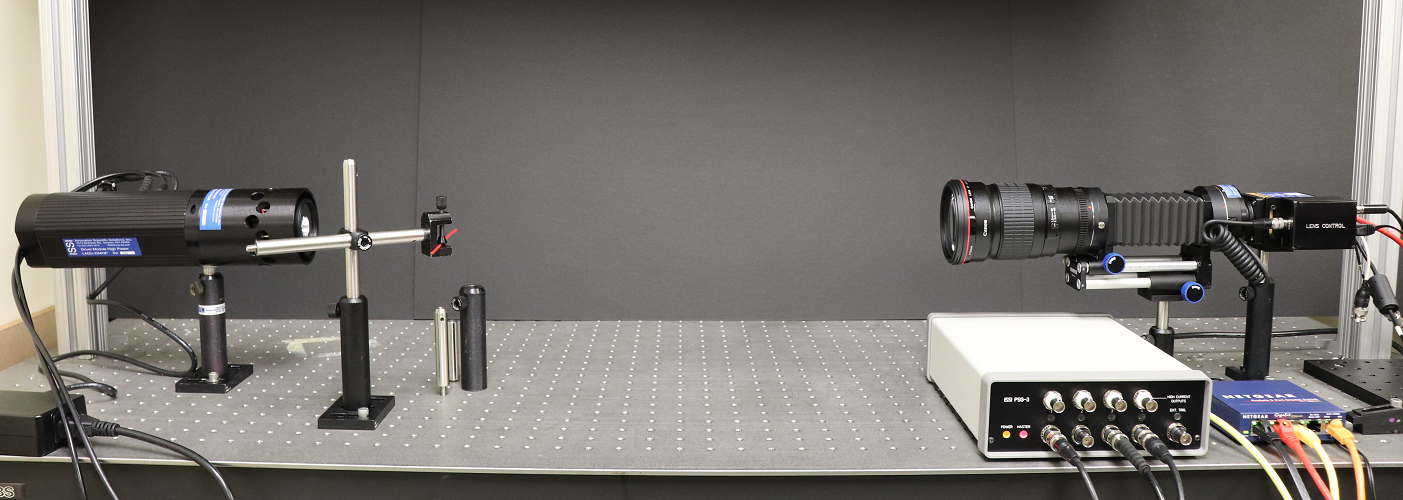
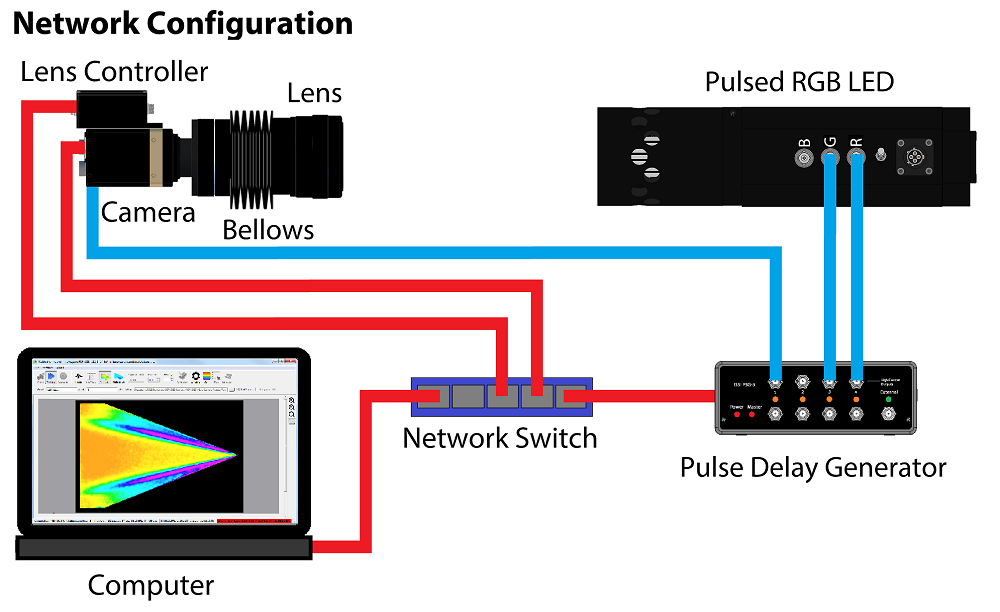
帶有硬件的PSV實(shí)驗(yàn)設(shè)置
系統(tǒng)組成
ISSI CCD彩色相機(jī)
(產(chǎn)品編號(hào):PSP-CCD-C)
PSP-CCD是用于壓敏涂料 數(shù)據(jù)采集的2百萬(wàn)像素CCD相機(jī) 。該攝像機(jī)小巧輕便,可將一系列攝像機(jī)安裝在狹窄的地方,以適應(yīng)更大尺寸的型號(hào)和應(yīng)用場(chǎng)合。通過(guò)千兆以太網(wǎng)與PSP-CCD進(jìn)行通信。相機(jī)有兩種選擇,一種是彩色傳感器,另一種是單色傳感器。彩色相機(jī)用于二進(jìn)制PSP 和 粒子陰影測(cè)速 應(yīng)用,而單色相機(jī)則用于 單色PSP或 表面應(yīng)力敏感膠片 應(yīng)用。
脈沖/延遲發(fā)生器
(產(chǎn)品編號(hào):PSG-3)
PSG-3是一個(gè)四通道脈沖/延遲發(fā)生器,用于控制實(shí)驗(yàn)參數(shù)的時(shí)序,可以用作實(shí)驗(yàn)主時(shí)鐘或由外部事件外部觸發(fā)(或門控)。脈沖寬度,延遲,重復(fù)率和其他時(shí)序參數(shù)由一個(gè)簡(jiǎn)單的用戶界面控制。通過(guò)以太網(wǎng)或USB 2.0連接進(jìn)行通信。API命令也可用于允許PSG-3通過(guò)以太網(wǎng)或USB 2.0集成到更大的數(shù)據(jù)采集系統(tǒng)中。對(duì)于PSV,PSG-3用于控制RGB LED和攝像機(jī)采集的脈沖寬度和延遲時(shí)間。
3色RGB LED光源
(產(chǎn)品ID:LM2X-DMHP-RGB)
LM2X-DMHP-RGB是一種LED光源,可從其LED頭提供3種顏色(紅色,綠色和藍(lán)色)輸出。該LED用于粒子陰影測(cè)速(PSV),以照亮流場(chǎng)中的小種子粒子,以測(cè)量速度和粒子密度。LM2X-DMHP-RGB具有3個(gè)BNC輸入,以控制來(lái)自外部脈沖發(fā)生器的每種輸出顏色的時(shí)序和脈沖寬度。通過(guò)向模塊上的外部BNC施加TTL電壓來(lái)控制脈沖LED的運(yùn)行。上升時(shí)間小于200 ns,下降時(shí)間小于100 ns,占空比為5%。距光源的距離大于18英寸時(shí),來(lái)自該單元的光分布約為高斯分布。
EF鏡頭控制器
(產(chǎn)品編號(hào):LC-2)
EF鏡頭控制器旨在操作Canon?EF,EF-S和L系列IS自動(dòng)對(duì)焦鏡頭以及Sigma?和Tamron?EF鏡頭。鏡頭控制器可以在非佳能?相機(jī)上操作這些鏡頭。LC-2為敏感光學(xué)系統(tǒng)(如粒子陰影測(cè)速儀)提供了鏡頭聚焦和光圈的精確控制。預(yù)設(shè)位置可以保存并精確調(diào)出,以移至實(shí)驗(yàn)中的特定焦平面。它的以太網(wǎng)連接使通信變得簡(jiǎn)單,并且允許它在遠(yuǎn)距離或通過(guò)網(wǎng)絡(luò)連接進(jìn)行操作。也可以通過(guò)API命令將LC-2控件寫入Windows和Linux的現(xiàn)有軟件中。
光學(xué)
在相機(jī)和鏡頭之間,使用延長(zhǎng)環(huán)將鏡頭移離相機(jī)的CCD傳感器。這將減少進(jìn)入相機(jī)的光量,從而縮小景深。理想情況下,PSV的景深為0.5到1.0毫米。這樣做是為了使一片粒子成像,使所有平面粒子模糊不清,從而使所獲得的速度矢量?jī)H處于二維。粒子圖像測(cè)速(PIV)中使用了類似的技術(shù),除了使用激光代替LED來(lái)照射粒子。延長(zhǎng)環(huán)也將縮小攝像機(jī)的視野。

PSV光學(xué)
PSV用戶
維珍娜技術(shù)公司水隧道中正在運(yùn)行的PSV系統(tǒng)硬件:水隧道中的PSV
示例數(shù)據(jù)

橫流氣缸

速度向量